



Borunte Robot Co., Ltd. is one of the most reliable manufacturers and suppliers of low failure rate servo injection robot in China, also supports customized service with low price. Please feel free to wholesale advanced low failure rate servo injection robot for sale here from our factory.
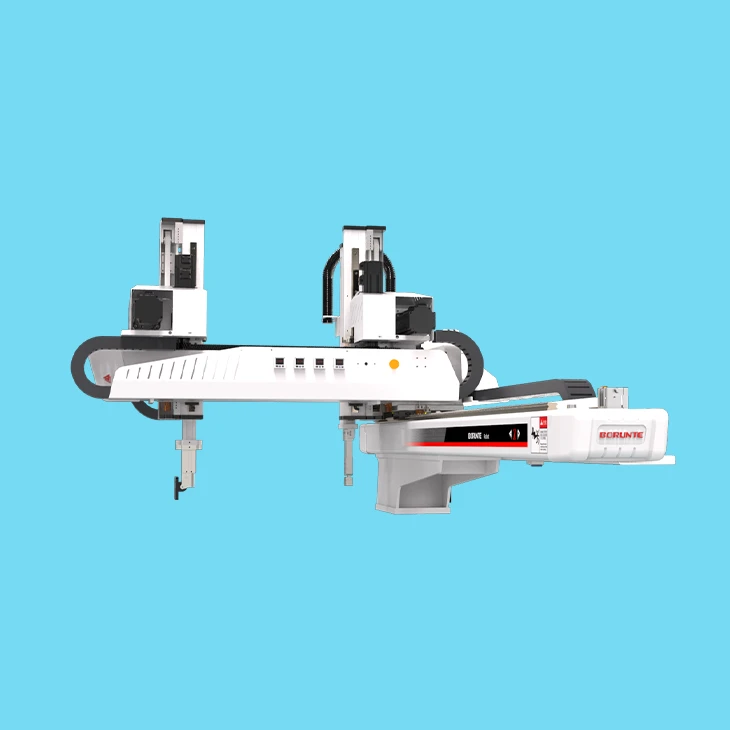
BRTR08TDS5PC
Product description:
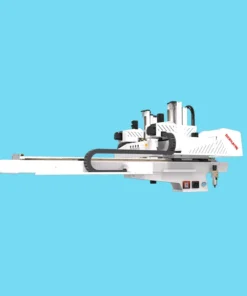
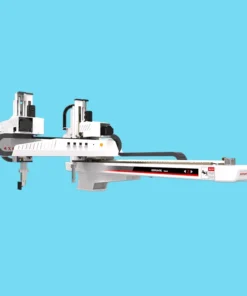
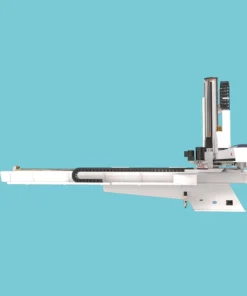
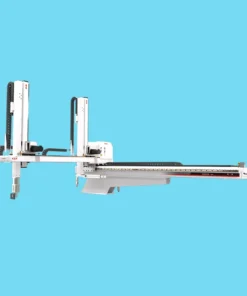
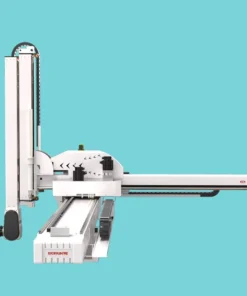
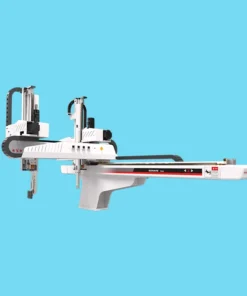
Low failure rate servo injection robot is a five-axis servo robotic arm. It is appropriate for the extraction of different horizontal injection molding machines ranging from 50T to 230T, as well as the shearing of plastic goods. The axis of the manipulator is operated by an AC servo, which has precise positioning, high speed, and a low failure rate. It may be used to retrieve injection molded goods quickly. The robotic arm can operate continuously for 24 hours, lowering labor expenses while improving output. Product quality can also be improved by regular and orderly retrieval.

Axial Definition of low failure rate servo injection robot:
Z axis: Traverse in/out axis of the manipulator.
X1 axis: Forward/backward axis of main arm of the manipulator.
Y1 axis: Up/down axis of main arm of the manipulator.
X2 axis: Forward/backward axis of assistant arm of the manipulator.
Y2 axis: Up/down axis of assistant arm of the manipulator.
C axis: Horizontal/vertical axis of main arm fixture of the manipulator.
B axis: Rotation axis of the manipulator fixture.
A axis: Horizontal/vertical axis 2 of main arm fixture of the manipulator.
Homing Method:
The homing method is divided into absolute value type and incremental type: Enter the Machine Parameters — Structure — Origin Settings; tick √ “Absolute Value Servo”, and it is absolute value type; if “Absolute Value Servo” is not ticked, it is incremental type; after modifying the homing method, click “Save” and turn the state switch to take effect. Before automatic operation, ensure that the axes have accurate origin position.
Absolute value homing method (the single-board injection molding system does not have the homing method:

In manual state, use the axis action buttons to move the manipulator to the origin position; and then enter the Machine Parameters — Structure — Origin Settings page, click “Start Origin” and then “Set to Origin” to set the target position as the origin. At this time, the coordinates are displayed as 0. When the power is cut off, the system will automatically memorize the position of each axis before the power off. After restarting, the position of each axis is still displayed as the position before the power off, and there is no need to return to the origin for many times. If you need to set another position as the origin, repeat the above steps.
Note: In absolute value homing method, you can only return to the origin by using the “Start Origin” and “Set to Origin” buttons on the Machine Parameters — Structure — Origin Settings screen, but not the “Origin” and “Start” buttons on the low failure rate servo injection robot operation panel.











Reviews
There are no reviews yet.